밀림에서의 드론 Lidar측량 수행
씨엘파트너(주)는 밀림에서 도로 및 수로공사의 지형도 조사를 위해 길이 20km, 폭 200m의 드론Lidar맵핑 비행을 수행하였다.
드론은 DJI macrice 300RTK이고, 센서는 Zenmuze L1(lidar)를 사용하였고, UgCS를 통해 비행경로 생성 및 미션관리를 하였다.
드론만 비행한다고 토공량이 바로 나오진 않는다.
인력측량 / 비행계획 수립 및 비행 / 후처리 / 도면화 / 보고서 작성
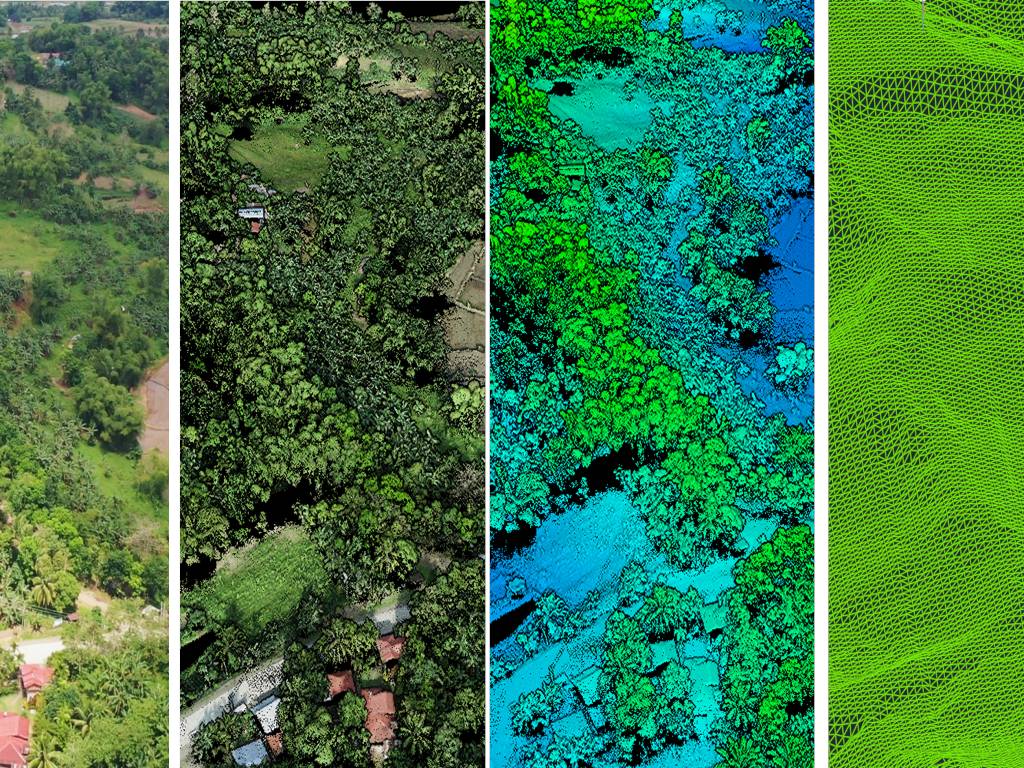
정글에서의 지형 측량의 경우 수목의 밀집도가 높아서 이미지맵핑만으로는 지형데이를 얻기 힘들다. 라이다 센서를 사용하면 나무 아래 지표면 데이터를 확보할 수 있어 정확한 지형도 제작이 가능하다.
밀림에서 Lidar드론의 비행경로 관리를 위해 UgCS를 사용을 추천한다.
공사도면기준의 드론 비행 작업범위 확인
건설공사는 정확한 좌표에 의해 수행된다. UgCS는 건설공사의 도면을 import할 수 있어 “Lidar corridor mapping”의 중심을 정확하게 파악할 수 있다.
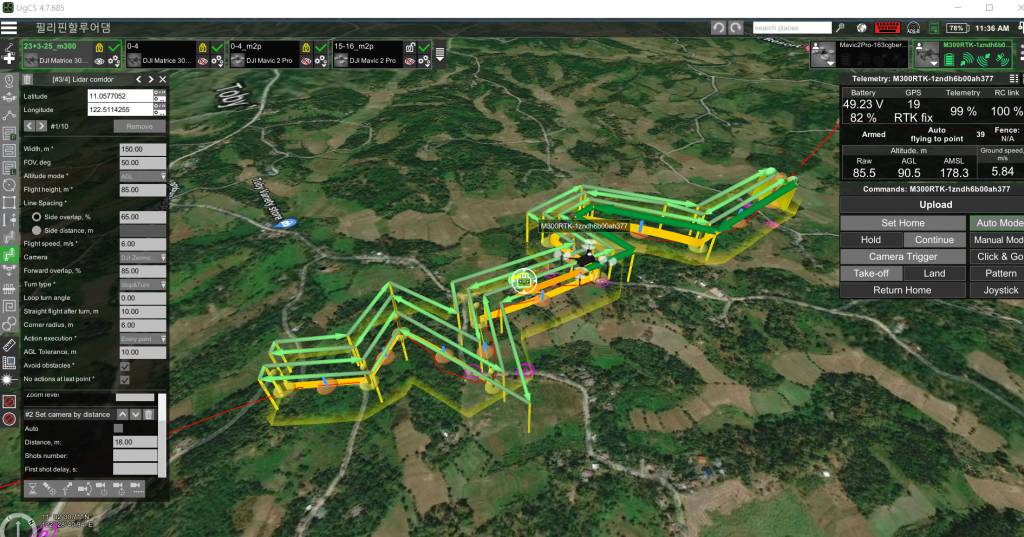
본 드론측량은 선형공사의 지형도를 생성을 목적으로 한다. 설계 중심선의 도면을 UgCS에 입력하여 드론경로의 중심선으로 하여 Corridor 방식의 라이다 맵핑을 수행하였다.
Terrain Follow Flight Mode
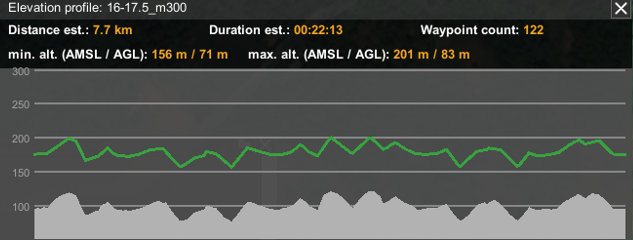
Lidar를 사용한 지형조사에서 지형데이터의 품질을 일정하게 유지하기 위해 드론비행은 지표면과 일정고도를 유지해야한다. 드론을 “terrain follow mode”로 비행하기 위해 UgCS 제품을 사용하였다. UgCS의 AGL비행은 비행고도를 지면과 일정하게 유지시킬 수 있다. 추가로 비행경로의 Elevation profile을 제공하여 예상비행시간 고도변화 등을 파악하여 사용자의 안전한 비행을 지원한다.
비행효율화
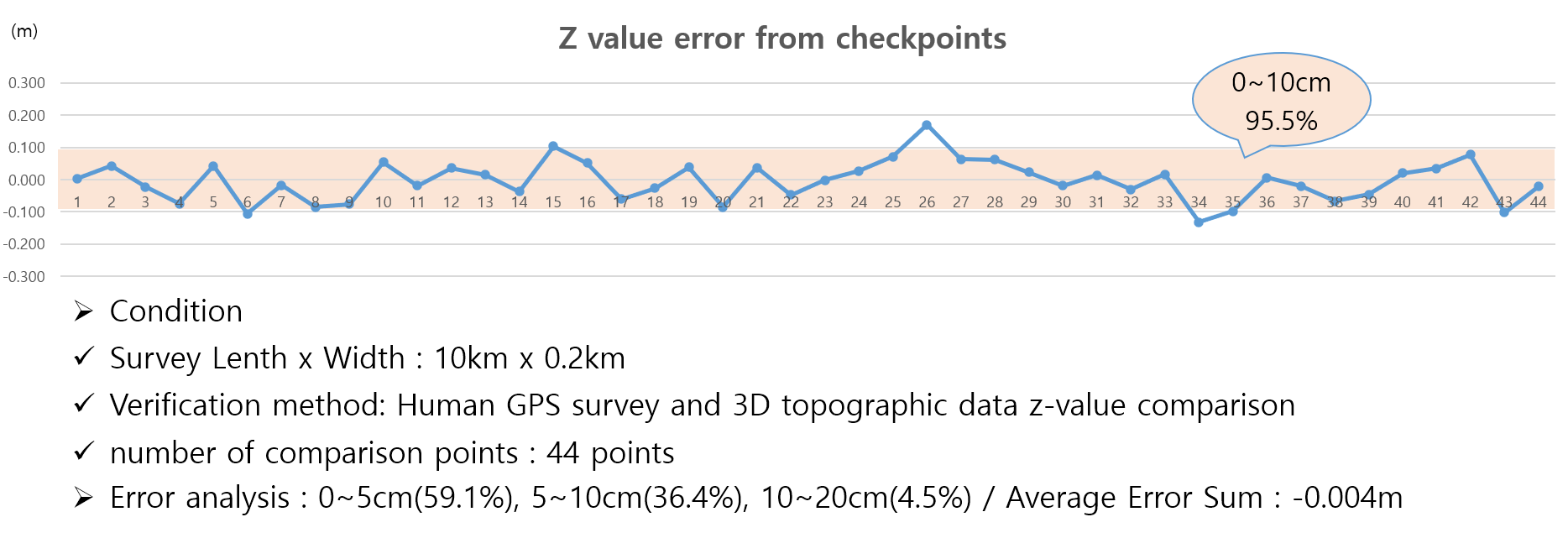
UgCS의 “Lidar Corridor Mapping” 임무는 비행고도 80m와 6m/s의 비행속도에서 1회 비행시 약 2.0km x 0.2km 범위를 스캔할 수 있다. 밀림지역은 수목의 밀도가 높아 드론의 비행속도를 6m/s로 제한했지만, 드론의 비행속도를 10m/s로 비행한다면 1회 비행으로 4km x 0.2km 미션수행이 가능할 것이다. UgCS는 DJIpilot과 다르게 Mapping 비행 전과 후에만 ‘캘리브레이션 비행’을 수행하기 때문에, 추가로 1km의 비행경로마다 캘리브레이션을 수행하는 DJIpilot보다 1회비행의 작업범위가 더 넓어진다. UgCS의 캘리브레이션 방식은 DJI에서 제시하는 L1의 정확도 오차범위(+-10cm이하)를 유지한다.
비행경로관리
대규모의 맵핑을 비행하기위해서는 여러개의 비행경로를 관리해야한다. 이번 CLpartner에서 수행한 길이 20km x 0.2km의 지형조사에서는 총 20개의 비행경로를 설정하고 비행했다. CLpartner는 UgCS의 사용으로 밀림에서의 지형조사를 효율적으로 수행했으며, 앞으로 다양한 곳에서의 드론Lidar비행을 수행할 것이다.

※ 본 포스트의 영문버젼은 UgCS의 공식기사에서도 확인 가능합니다.
[ 기사링크 ]
씨엘파트너(주)는 UgCS의 공식판매처입니다
[ UgCS 구매 ]


